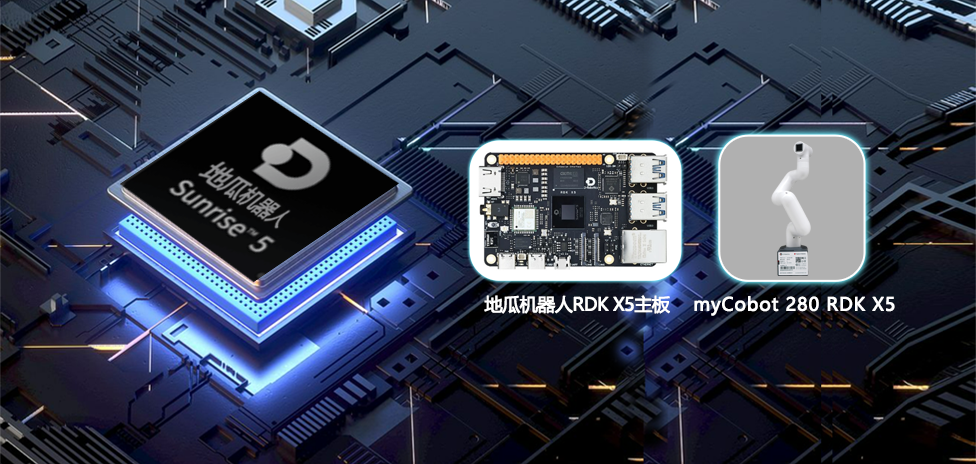
ER myCobot 280 RDK X5 技術(shù)參數(shù) 使用手冊(cè) 前往京東 前往淘寶 產(chǎn)品功能與應(yīng)用 myCobot280 RDK X5內(nèi)置RDK OS 操作系統(tǒng),搭載地瓜機(jī)器人RDK X5機(jī)器人開(kāi)發(fā)者套件,可提供 高達(dá)10 Tops的算力,支持Transformer、RWKV、Occupancy、Stereo Perception等多種復(fù)雜模型 和最新算法,加速智能化應(yīng)用快速落地,面向智能計(jì)算與機(jī)器人應(yīng)用,接口豐富,極致易用。 支持多種開(kāi)源視覺(jué)和語(yǔ)言大模型 大語(yǔ)言模型 支持基于Transformer和RWKV的大語(yǔ)言模型,如LLaMA, RWKV V4 0.5B, Qwen2-0.5B, CLIP等視覺(jué)大語(yǔ)言的部署和高效運(yùn)行,可以在RDK X5 上實(shí)現(xiàn)圖文搜索、語(yǔ)言交互等功能。 YOLO-World模型 邊緣側(cè)開(kāi)放詞匯檢測(cè)模型,結(jié)合語(yǔ)言與視覺(jué)特征,具備泛化性,高效運(yùn)行于RDK X5,可解決機(jī)器人長(zhǎng)尾問(wèn)題。 Mobile-SAM 針對(duì)邊緣側(cè)的輕量級(jí)通用分割網(wǎng)絡(luò),利用prompt和圖像的結(jié)合,實(shí)現(xiàn)通用 物體分割功能。可在RDK X5 上高效 運(yùn)行,結(jié)合YOLO-World可實(shí)現(xiàn)對(duì)障 礙物在圖像中的像素級(jí)定位。 適配RDK X5 AI視覺(jué)碼垛套裝 集成7種視覺(jué)算法、支持本地部署Deepseek大模型,通過(guò)物體識(shí)別YOLOv8、垃圾分類檢測(cè)、 ARUCO碼識(shí)別碼垛、OCR文字識(shí)別提取等應(yīng)用。從圖像特征提取到神經(jīng)網(wǎng)絡(luò)部署,構(gòu)建完整算法 應(yīng)用-工程實(shí)踐全流程認(rèn)知體系,以Python代碼實(shí)踐神經(jīng)網(wǎng)絡(luò)部署,快速掌握AI視覺(jué)算法開(kāi)發(fā)與機(jī) 器人協(xié)同能力,適用于高校實(shí)訓(xùn)、機(jī)器人實(shí)驗(yàn)室及個(gè)人技術(shù)探索。 Deepseek大模型互動(dòng) 手勢(shì)互動(dòng) OCR 文字識(shí)別 ARUCO碼識(shí)別碼垛 Stag 碼識(shí)別 垃圾拾取 顏色識(shí)別 物體識(shí)別 RDK X5與myCobot 280生態(tài)聯(lián)合賦能 RDK X5擁有卓越的社區(qū)生態(tài),匯聚近10萬(wàn)名開(kāi)發(fā)者,提供上百種配件與套件,以及豐富的內(nèi)容 和賽事活動(dòng),助力開(kāi)發(fā)者解決難題、提升技術(shù)能力。以此為控制核心的myCobot 280 RDK X5 專為科研教育和創(chuàng)科應(yīng)用開(kāi)發(fā),支持拼圖式、代碼式編程及手動(dòng)拖動(dòng)等多種控制方式,內(nèi)置運(yùn) 動(dòng)控制算法,提供超90個(gè)開(kāi)源驅(qū)動(dòng)接口,助力復(fù)雜應(yīng)用開(kāi)發(fā)。兩者的生態(tài)融合,為機(jī)器人開(kāi)發(fā) 提供強(qiáng)大支持,推動(dòng)技術(shù)創(chuàng)新與應(yīng)用拓展。 產(chǎn)品參數(shù)與功能 工作半徑 280mm 負(fù)載 250g 地瓜機(jī)器人 任意攝像頭 APP 控制 拖動(dòng)示教 手柄控制 AI大模型 ROS2仿真控制 MYBLOCKLY GPIO接口 HDMI接口 實(shí)踐式新科學(xué)課程 Python 硬核配置 硬核的產(chǎn)品配置,完成您的嵌入式開(kāi)發(fā)需求,按鍵交互,屏幕顯示,蜂鳴器,IO接口,你的所思所想,皆可開(kāi)發(fā)。 基于地瓜機(jī)器人RDK X5主板 機(jī)器人操作系統(tǒng)-RDK OS仿真支持 RDK OS——專門(mén)針對(duì)RDK系列機(jī)器人開(kāi)發(fā)者套件打造的機(jī)器人操作系統(tǒng),以Linux和Ubuntu為系統(tǒng) 內(nèi)核,基于ROS 2深度優(yōu)化定制了高性能、高可靠、高實(shí)時(shí)的機(jī)器人開(kāi)發(fā)中間件TogetheROS.Bot, 為機(jī)器人開(kāi)發(fā)提供大量核心算法和模型推理接口,同時(shí)集成了VSLAM、Occupany、Stereo Perception、Yolo World、大模型等豐富的應(yīng)用功能,助力開(kāi)發(fā)者快速搭建、落地機(jī)器人應(yīng)用。 機(jī)器人編程輕松入門(mén) 提供專用于入門(mén)級(jí)教學(xué)的圖像拖拽式編程軟件 myBlockly ,拼圖式編程、圖形化調(diào)試?具,讓新手也能輕松駕馭機(jī)械臂; Python 2/3 開(kāi)發(fā)環(huán)境,支持OpenCV、QT、pymycobot等多種開(kāi)發(fā)驅(qū)動(dòng)庫(kù),機(jī)器人控制、圖像識(shí)別、前端開(kāi)發(fā)滿足用戶的進(jìn)階開(kāi)發(fā)需求; myBlockly Python 超多配件,隨心搭配 自適應(yīng)夾爪、攝像頭法蘭、吸泵等數(shù)十種配件,幫助你盡情發(fā)揮myCobot的創(chuàng)意想法 前往購(gòu)買 自適應(yīng)夾爪 平行夾爪 張角式夾爪 靈巧手 垂直吸泵 雙頭吸泵 筆夾持器 手機(jī)夾持器 攝像頭模組 春筍法蘭 G型底座 平面底座 ER myCobot 280 RDK X5 ¥6499 立即購(gòu)買 官網(wǎng)所有商品價(jià)格僅供參考,實(shí)際價(jià)格以結(jié)算為準(zhǔn)。
















示教.png)









夾爪.png)





夾持器-1.png)