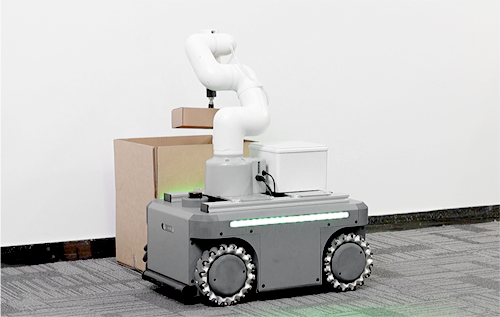
myAGV Pro 使用手冊 前往淘寶 前往京東 產品功能 myAGV Pro全向轉向系統小車,負載50kg,最大運動速度1.5m/s,硬件上選配移動底盤全向輪/蜂窩自主動輪、2D/3D激光雷 達、2D/3D視覺相機、自動回充模塊等一系列配置,軟件系統上完美適配 ROS2 的長期穩定Humble版本、支持2D 或 3D 的 SLAM 定位導航算法Gmapping、 Cartographer、RTABMAP 等,同時也可以完成多目標環境檢測、語音語義識別等人工智 能的相關應用,作為復合機器人底盤選項,適配320、630、750、A1等機械臂,是智能機器人領域方面進行倉儲搬運、教學 學習、創新應用、科研研究和參加舉行競技比賽的理想平臺。 驅動 全向移動系統 速度 1.5m/s 負載 50kg 電池 24V 20mAh 磷酸鐵鋰 建圖導航 支持 2/3DSLAM,NAV2 模塊化設計 電池快拆更換 ROS2 適配ROS2 Humble 仿真 支持RVIZ、Gezebo仿真 模塊化設計 支持靈活定制 硬件采用高度模塊化架構,支持核心功能組件按需選配。運動底盤可選配麥輪或全向輪方案;感知系統支持2D/3D激光雷達自由搭配; 視覺系統兼容2D/3D相機擴展;功能模塊集成自動回充功能。 多場景智控復合機器人 myAGV Pro可搭載多種機械臂,提供構建具身智能訓練與固定場景自動化作業一體化解決方案。 物流分揀訓練場 myCobot320+吸泵機械臂構建快遞分揀環 境,支持抓取-裝載動作的強化學習數據采 集與策略驗證。 家居服務仿真環境 myArm M750機械臂模擬臟衣物收納任務,提供 觸覺反饋與視覺識別的多模態訓練數據集。 智能辦公交互實驗 myCobot Pro630機械臂+力控夾爪+視覺系統復現 CMU開門任務,支持基于物理交互的模仿學習算法 調優。 標準開發方式支持 全系配置提供標準化通信接口與開發協議,無縫對接主流硬件平臺及Ubuntu22.04+ROS2 Humble開發環境。基于Ubuntu22.04 LTS,提供長期支持與安全更新,保障系統穩定運行,提供RVIZ、Gazebo仿真環境支持。 集成ROS2 Humble 框架,支持Gmapping、Cartographer及Rtabmap主流3D SLAM算法,實現高精度建圖與導航定位,滿足復雜環境下的自主移動 需求。提供豐富的 python API接口與示例代碼,快速響應倉儲物流、安防巡檢等多場景定制需求。支持標準RS232串口協議— 可外接各類微控制器,自定義系統及導航方案,實現跨平臺無縫集成;極簡部署流程,內置可視化UI界面一鍵啟動,兼容無線手 柄即插即用控制,降低操作門檻。 安全高效 智能續航 安全可靠的磷酸鐵鋰電池 熱穩定性優異,循環壽命長,適應多 種作業環境。 便捷的快拆式電池更換 快速更換備用電池,減少停機時間, 提升作業連續性。 智能自動回充功能 低電量自動返回充電,簡化運維流程, 保障作業不間斷。 技術參數 參數類別?詳細信息?產品尺寸530*360*245mm自重40KG最大載重50KG運動模式全向系統轉向通訊接口RS232速度(滿載測試)1.5m/s最小轉彎半徑0m(原地自轉)最大爬坡角度10°電池24V 20AH 磷酸鐵鋰續航(空載 1m/s)5-6小時充電時長5-6小時懸掛形式搖擺臂獨?懸掛適用場地室內防護等級IP22工作溫度-10-40℃對外接口DC4017充電口XT60 24V5A供電口*1XT30 12V5A供電口*1USB-C串口*1網口*1HDMI*1INPUT IO*6OUTPUT*6USB3.0*2