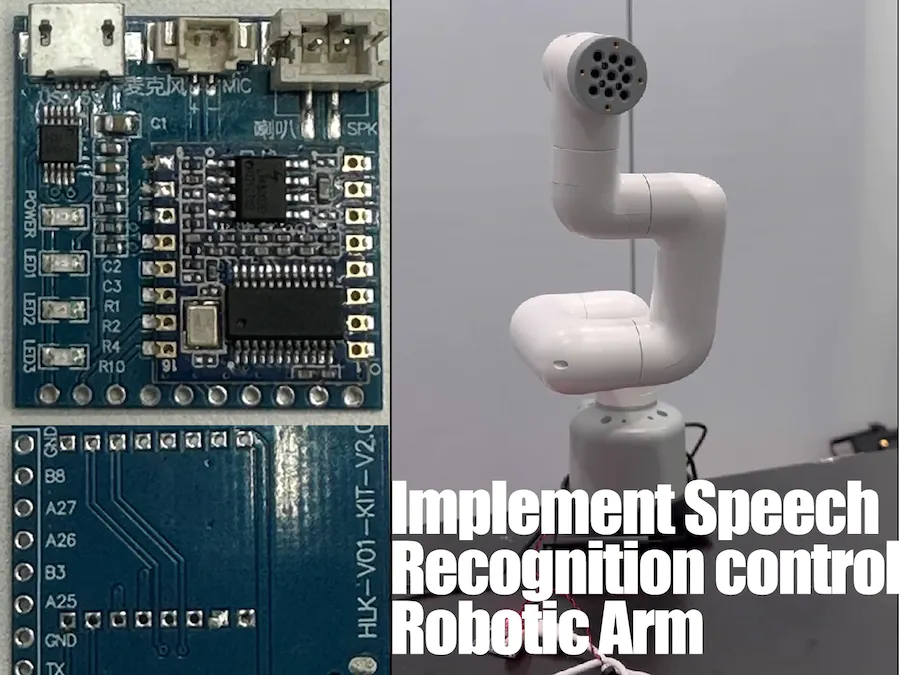
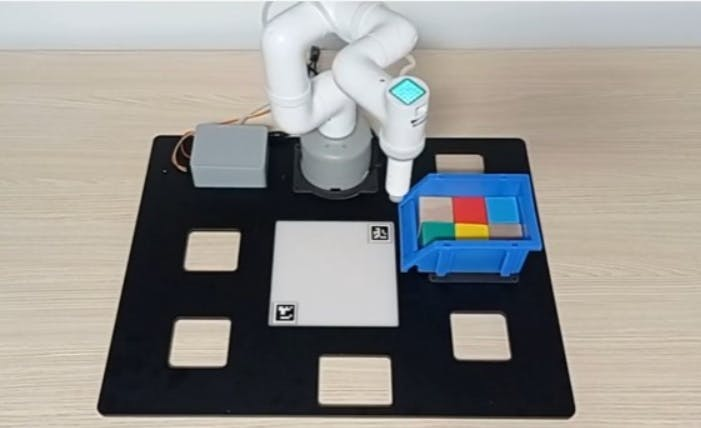
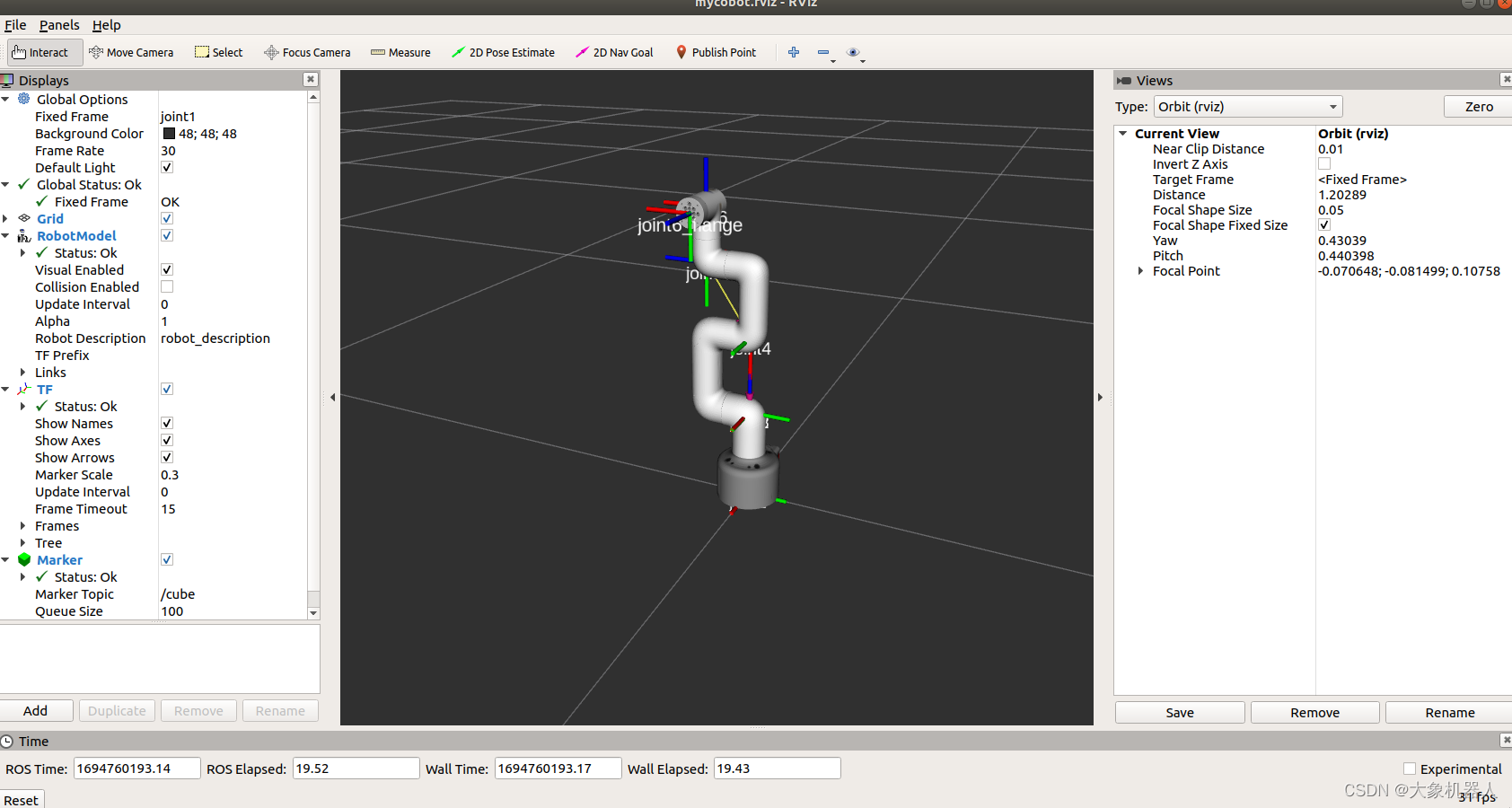
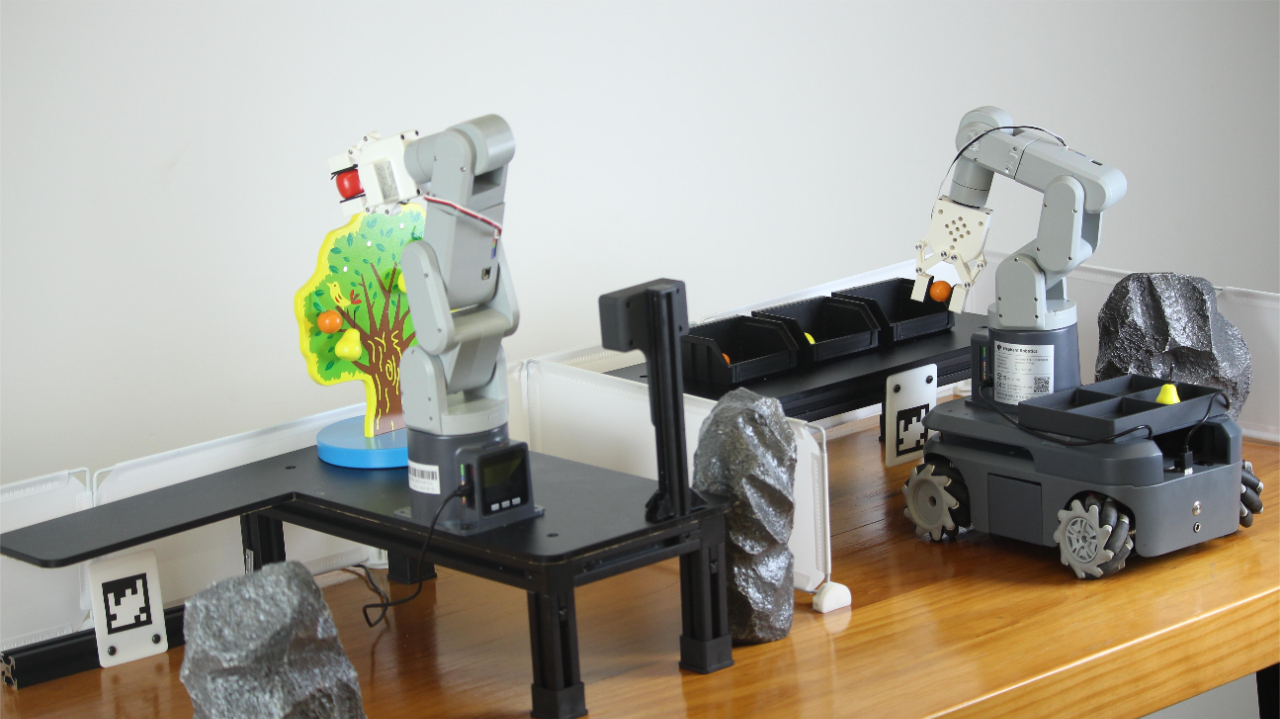
技術(shù)案例 讓我們一起探索一些有趣的創(chuàng)新技術(shù)實(shí)例,每個(gè)案例都各具特色,讓我們來看看這些令人驚嘆的技術(shù)案例吧! 大象機(jī)器人六軸協(xié)作機(jī)械臂mechArm pi 進(jìn)行人臉識(shí)別項(xiàng)目。 大象機(jī)械臂mechArm pi人臉識(shí)別項(xiàng)目 Elephant Robotics 使用mechArm 270桌面型六軸協(xié)作機(jī)械臂,配備攝像頭進(jìn)行人臉識(shí)別和跟蹤。 六軸機(jī)械臂機(jī)械臂人臉識(shí)別和跟蹤 Sina, Elephant Robotics 水果采摘和分揀機(jī)器人的應(yīng)用場(chǎng)景不僅可以幫助學(xué)生更好地理解機(jī)械原理和電子控制技術(shù),還可以促進(jìn)他們對(duì)科學(xué)技術(shù)的興趣和熱愛。 機(jī)器人學(xué)科建設(shè)沙盤套件!mechArm機(jī)械臂智慧農(nóng)業(yè)3D分揀套裝詳解 Elephant Robotics 介紹了使用myCobot 280進(jìn)行Connect4游戲的人工智能研究,采用極小化極大算法、Alpha-Beta剪枝算法和神經(jīng)網(wǎng)絡(luò)+深度學(xué)習(xí)對(duì)弈。通過DQN神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)智能體學(xué)習(xí)與對(duì)手對(duì)戰(zhàn)。 對(duì)弈人工智能!myCobot 280開源六軸機(jī)械臂Connect 4 四子棋對(duì)弈上篇 Elephant Robotics 介紹了使用AI機(jī)械臂進(jìn)行Connect4下棋的實(shí)現(xiàn)。包括獲取棋盤信息(攝像頭識(shí)別、處理算法)、處理信息(對(duì)弈算法預(yù)測(cè)下一步)、機(jī)械臂軌跡規(guī)劃等步驟。 對(duì)弈人工智能!myCobot 280開源六軸機(jī)械臂Connect 4 四子棋對(duì)弈下篇 Elephant Robotics 目標(biāo)是開發(fā)一個(gè)能夠準(zhǔn)確識(shí)別和跟蹤物體的機(jī)械臂系統(tǒng),以便在實(shí)際應(yīng)用中發(fā)揮作用,這個(gè)項(xiàng)目涉及到許多技術(shù)和算法,包括視覺識(shí)別、手眼協(xié)同和機(jī)械臂控制等方面。 使用myCobot 280 Jeston Nano進(jìn)行物體精確識(shí)別追蹤 Elephant Robotics 深度相機(jī)可以捕捉深度信息,因此可以獲得物體的三維信息。這些相機(jī)使用各種技術(shù)來測(cè)量物體的深度,如結(jié)構(gòu)光、時(shí)間飛行和立體視覺等。 3D深度視覺與myCobot 320機(jī)械臂無序抓取 Elephant Robotics 使用RealSense D455的空間識(shí)別操作6軸協(xié)作機(jī)械臂myCobot 280 M5。 使用RealSense D455的空間識(shí)別操作myCobot Elephant Robotics 使用由 Nvidia 開發(fā)的 Isaac Gym,實(shí)現(xiàn)從創(chuàng)建實(shí)驗(yàn)環(huán)境到僅使用 Python 代碼進(jìn)行強(qiáng)化學(xué)習(xí)的所有目標(biāo)。 使用Isaac Gym 來強(qiáng)化學(xué)習(xí)myCobot 機(jī)械臂執(zhí)行抓取任務(wù) Elephant Robotics 探索 Jetson Nano 為 myCobot 280 提供的強(qiáng)大功能,機(jī)器人技術(shù)的一個(gè)有前途的組合。 探索 Jetson Nano 為 myCobot 280 機(jī)械臂提供的強(qiáng)大功能 Elephant Robotics 機(jī)械臂是一種可編程的、自動(dòng)化的機(jī)械系統(tǒng),它可以模擬人類的動(dòng)作,完成各種任務(wù),例如裝配、噴涂、包裝、搬運(yùn)、焊接、研磨等。由于其高度靈活性和多功能性,機(jī)械臂在現(xiàn)代社會(huì)中已經(jīng)得到了廣泛的應(yīng)用。 myCobot 280 2023機(jī)械臂全新功能,手柄控制、自干涉檢測(cè) Sai Vemprala 基于語音識(shí)別技術(shù)的機(jī)器人手臂控制智能化嘗試 實(shí)現(xiàn)使用語音控制myCobot機(jī)械臂運(yùn)動(dòng) Elephant Robotics 我們將 ChatGPT 的功能擴(kuò)展到機(jī)器人,并通過語言直觀地控制機(jī)器人手臂 myCobot機(jī)器人ChatGPT應(yīng)用:設(shè)計(jì)原則和模型能力 Elephant Robotics myCobot 280 M5Stack 2023是一款高性能桌面型機(jī)械臂,其強(qiáng)大的功能和多種新特性使其成為教育、科研和輕型制造等領(lǐng)域的理想選擇。 大象機(jī)器人myCobot 280 2023版全新功能展示 i olll 主要內(nèi)容是描述如何用myCobot320 M5Stack 2022 和 DSee-65X全息投影設(shè)備來實(shí)現(xiàn)裸眼3D的展示。 大象機(jī)器人開源六軸機(jī)械臂myCobot 320全息投影 i olll 從ROS介紹、環(huán)境配置到使用MoveIt進(jìn)行運(yùn)動(dòng)規(guī)劃,詳細(xì)說明了創(chuàng)建URDF文件、加載到ROS服務(wù)器、配置MoveIt等步驟。 使用ROS與Movelt實(shí)現(xiàn)myCobot 280運(yùn)動(dòng)軌跡規(guī)劃和控制 Elephant Robotics 該創(chuàng)新解決方案將模擬自動(dòng)水果采摘機(jī)與水果分揀和配送自動(dòng)化的復(fù)合機(jī)器人結(jié)合起來,為學(xué)生提供了在最熱門和最有發(fā)展趨勢(shì)的技術(shù)領(lǐng)域的全面學(xué)習(xí)體驗(yàn)。 創(chuàng)新實(shí)踐,復(fù)合機(jī)器人采摘運(yùn)輸教育沙盤案例研究 Elephant Robotics myAGV 是 Elephant Robotics 的一款自動(dòng)導(dǎo)航智能車輛, 它采用了競(jìng)賽級(jí)別的麥克納姆車輪和帶有金屬框架的全包裹設(shè)計(jì)。 myAgv智能移動(dòng)底盤的slam算法學(xué)習(xí)以及動(dòng)態(tài)避障 i olll 動(dòng)態(tài)避障是指在移動(dòng)機(jī)器人或自動(dòng)駕駛汽車等智能移動(dòng)設(shè)備在行進(jìn)過程中,通過實(shí)時(shí)感知周圍環(huán)境的變化,采取相應(yīng)的措施以避免與障礙物發(fā)生碰撞的技術(shù)。 myAgv的slam算法學(xué)習(xí)以及動(dòng)態(tài)避障下篇 i olll 用機(jī)械臂+相機(jī)是想物體的抓取,不只是一個(gè)平面的抓取,而是一個(gè)能夠根據(jù)獲取的深度信息進(jìn)行判斷高度的抓取。 myCobot Pro600六軸機(jī)械臂與3D深度視覺:物體精確識(shí)別抓取堆疊 Elephant Robotics 1