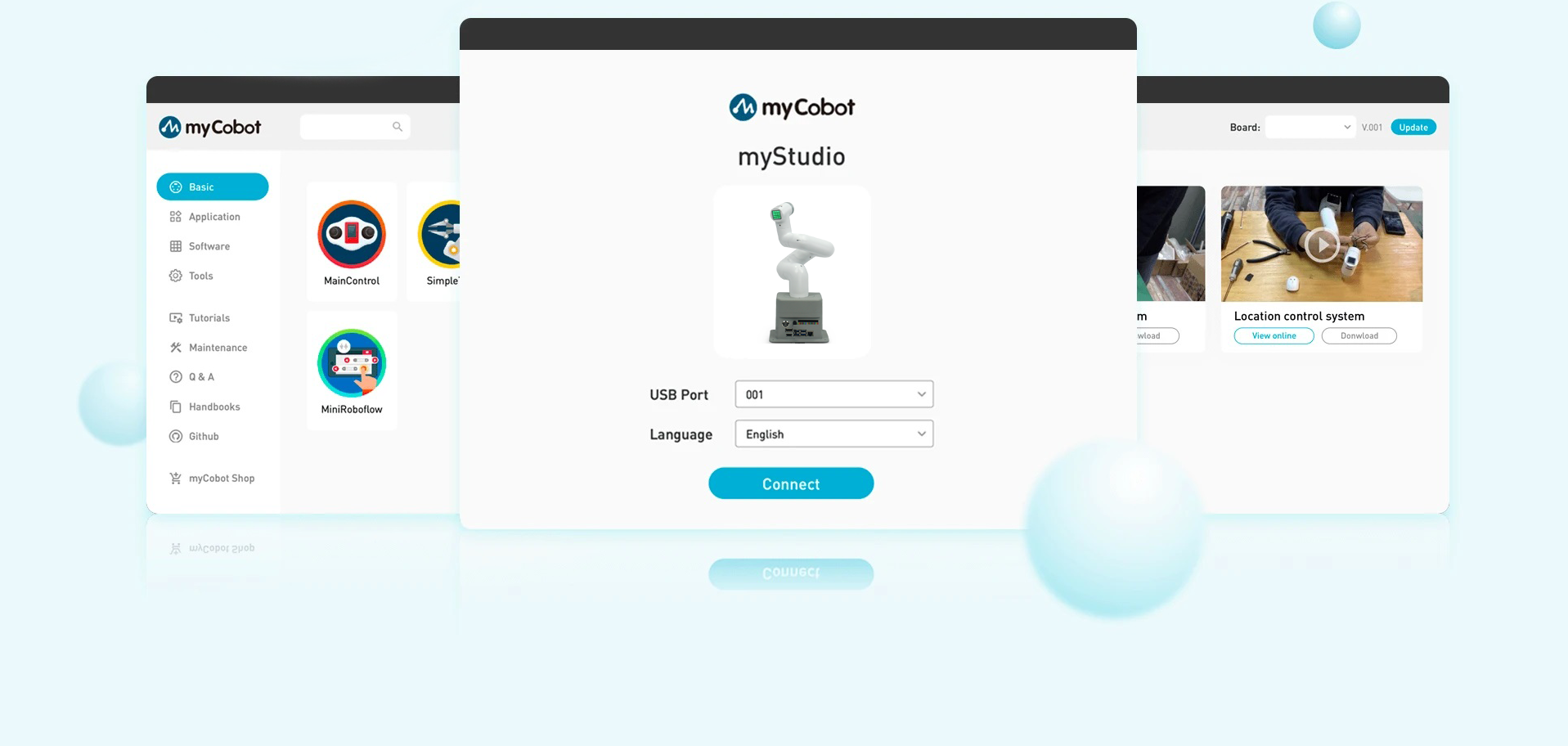
myCobot 280 Jetson Nano 2023 支持中心 產(chǎn)品特性 技術(shù)參數(shù) 使用手冊 前往淘寶 前往京東 產(chǎn)品功能與應(yīng)用 ER myCobot 280 Jetson Nano 采用 NVIDIA? Jetson Nano? 核心開發(fā)版作為主控,內(nèi)置Ubuntu Mate 20.04 操作系統(tǒng),無需額外搭配PC主控,直接鏈接顯示器、鍵盤、鼠標(biāo)即可使用,是快速構(gòu)建機械臂 機器視覺與機器人應(yīng)用、控制邏輯開發(fā)、機器人融合開發(fā)、ROS仿真實驗課堂的首選助手,幫助您快速開始六軸機械臂學(xué)習(xí)與應(yīng)用。 視覺應(yīng)用輕松入門 myCobot?280?JN?2023?內(nèi)置?NVIDIA?JETSON?NANO,為設(shè)備提供了強大的圖像處理能力。提供標(biāo)準(zhǔn)的末端2D攝像頭模組,eye?in?hand?應(yīng)用開發(fā)方便快捷?。 系統(tǒng)開發(fā)簡單快捷 myCobot 系列通用 Ubuntu Mate 20.04 操作系統(tǒng),集成 myBlockly、Python、ROS 1\2等多種開發(fā)控制環(huán)境,支持?jǐn)U展 數(shù)十種末端控制配件,極大地擴展了機器人場景應(yīng)用能力。 創(chuàng)意開發(fā) myCobot 280 系列機械臂內(nèi)置大象機器人自主研發(fā)的機器人運動控制算法,支持角度、坐標(biāo)、電位值、 弧度值多種控制模式,便于?戶理解機器人復(fù)雜的工作原理和機器?應(yīng)用原理。myCobot 280 系列機械臂產(chǎn)品開源驅(qū)動庫提供超90+機器人控制接?,1:1還原工業(yè)機器人基礎(chǔ)控制接口,讓用戶編程體驗更加接近真實的工業(yè)機器人開發(fā)應(yīng)用。 商業(yè)探索 myCobot 280 系列機械臂,支持開發(fā)應(yīng)用配合,可以擴展多種如 PC、工控機、嵌入式設(shè)備主控,適合多種應(yīng)用場景。產(chǎn)品支持十余個配件,包含底座、末端擴展、周邊產(chǎn)品等,多配件疊加可以完成復(fù)雜項目應(yīng)用,滿足商業(yè)化展會展示,如機器人應(yīng)用模型展示、教育教學(xué)套裝展示、工業(yè)4.0的應(yīng)用場景展示等; 產(chǎn)品累計銷售已超過10000臺,運往全球50+個國家 產(chǎn)品功能與參數(shù) 工作半徑 280mm 負(fù)載 250g Jetson Nano Ubuntu Mate 實踐式新科學(xué)課程 拖動示教 Lego ROS1仿真控制 ROS2仿真控制 Python myBlockly OpenCV HDMI接口 Grove接口 硬核配置 完全開放的 NVIDIA Jetson Nano 開發(fā)接口,可擴展的高性能手臂。 全面開放的軟件控制接口 依據(jù)科研教育等各類應(yīng)用場景,全面開放控制接口,為你提供更全面、更具針對性的接口選擇,滿足你實現(xiàn)物品分揀、人臉識別、圖像識別等AI場景需求。 ROS仿真控制支持 提供ROS1 和 ROS2 多版本的開發(fā)支持,不同版本相同擴展?持,提供不同版本下的 RVIZ、MOVEIT演示案例,滿足用戶的深度開發(fā)需求。 大象機器人·英偉達(dá)官方合作 Jetson Nano原裝正版 圖像處理 二次開發(fā) 實驗課堂 超多配件,隨心搭配 自適應(yīng)夾爪、攝像頭法蘭、吸泵等數(shù)十種配件,幫助你盡情發(fā)揮myCobot的創(chuàng)意想法 前往購買 自適應(yīng)夾爪 平行夾爪 張角式夾爪 靈巧手 垂直吸泵 雙頭吸泵 筆夾持器 手機夾持器 攝像頭模組 春筍法蘭 G型底座 平面底座 myAGV + myCobot 280 移動底盤+機械手臂 搭配開發(fā),低成本開始機器人協(xié)作、SLAM建圖、自主導(dǎo)航、ROS開發(fā)環(huán)境、六軸協(xié)作機器人控制、視覺識別、設(shè)備間通信等多種開發(fā)內(nèi)容。 開箱視頻 myCobot 280 Jetson Nano myStudio 一站式的機器人應(yīng)用平臺機器人驅(qū)動安裝,機器人固件升級,使用文檔閱讀,視頻教程觀看等多種功能 前往下載 ER myCobot 280 Jetson Nano ¥7999 起 立即購買 官網(wǎng)所有商品價格僅供參考,實際價格以結(jié)算為準(zhǔn)。
品頁-1.png)


















夾爪.png)